Search Results for author:
Found 33 papers, 15 papers with code
Diffeomorphic Template Registration for Atmospheric Turbulence Mitigation
Rather than initializing a latent irradiance ("template") by heuristics to estimate deformation, we select one of the images as a reference, and model the deformation in this image by the aggregation of the optical flow from it to other images, exploiting a prior imposed by Central Limit Theorem.
WorDepth: Variational Language Prior for Monocular Depth Estimation
To test this, we focus on monocular depth estimation, the problem of predicting a dense depth map from a single image, but with an additional text caption describing the scene.


WeatherProof: Leveraging Language Guidance for Semantic Segmentation in Adverse Weather
We propose a method to infer semantic segmentation maps from images captured under adverse weather conditions.

GT-Rain Single Image Deraining Challenge Report
This report reviews the results of the GT-Rain challenge on single image deraining at the UG2+ workshop at CVPR 2023.

Parking of Connected Automated Vehicles: Vehicle Control, Parking Assignment, and Multi-agent Simulation
This paper introduces a novel approach to optimize the parking efficiency for fleets of Connected and Automated Vehicles (CAVs).

Test-Time Adaptation for Depth Completion
During test time, sparse depth features are projected using this map as a proxy for source domain features and are used as guidance to train a set of auxiliary parameters (i. e., adaptation layer) to align image and sparse depth features from the target test domain to that of the source domain.

Binding Touch to Everything: Learning Unified Multimodal Tactile Representations
We introduce UniTouch, a unified tactile model for vision-based touch sensors connected to multiple modalities, including vision, language, and sound.


WeatherProof: A Paired-Dataset Approach to Semantic Segmentation in Adverse Weather
To this end, we create the WeatherProof Dataset, the first semantic segmentation dataset with accurate clear and adverse weather image pairs, which not only enables our new training paradigm, but also improves the evaluation of the performance gap between clear and degraded segmentation.
Heteroscedastic Uncertainty Estimation for Probabilistic Unsupervised Registration of Noisy Medical Images
This paper proposes a heteroscedastic uncertainty estimation framework for unsupervised medical image registration.

An Adaptive Correspondence Scoring Framework for Unsupervised Image Registration of Medical Images
As the unsupervised learning scheme relies on intensity constancy to establish correspondence between images for reconstruction, this introduces spurious error residuals that are not modeled by the typical training objective.
Enhancing Diffusion Models with 3D Perspective Geometry Constraints
We show that outputs of models trained with this constraint both appear more realistic and improve performance of downstream models trained on generated images.

AugUndo: Scaling Up Augmentations for Unsupervised Depth Completion
The sparse depth modality have seen even less as intensity transformations alter the scale of the 3D scene, and geometric transformations may decimate the sparse points during resampling.

Sub-token ViT Embedding via Stochastic Resonance Transformers
Vision Transformer (ViT) architectures represent images as collections of high-dimensional vectorized tokens, each corresponding to a rectangular non-overlapping patch.

DEUX: Active Exploration for Learning Unsupervised Depth Perception
Training with data collected by our approach improves depth completion by an average greater than 18% across four depth completion models compared to existing exploration methods on the MP3D test set.
WeatherStream: Light Transport Automation of Single Image Deweathering
We introduce a pipeline that uses the power of light-transport physics and a model trained on a small, initial seed dataset to reject approximately 99. 6% of unwanted scenes.
Depth Estimation From Camera Image and mmWave Radar Point Cloud
To fuse radar depth with an image, we propose a gated fusion scheme that accounts for the confidence scores of the correspondence so that we selectively combine radar and camera embeddings to yield a dense depth map.
Stain-invariant self supervised learning for histopathology image analysis
Our method achieves the state-of-the-art performance on several publicly available breast cancer datasets ranging from tumor classification (CAMELYON17) and subtyping (BRACS) to HER2 status classification and treatment response prediction.


Not Just Streaks: Towards Ground Truth for Single Image Deraining
We propose a large-scale dataset of real-world rainy and clean image pairs and a method to remove degradations, induced by rain streaks and rain accumulation, from the image.
Monitored Distillation for Positive Congruent Depth Completion
In the absence of ground truth for model selection and training, our method, termed Monitored Distillation, allows a student to exploit a blind ensemble of teachers by selectively learning from predictions that best minimize the reconstruction error for a given image.
On the Viability of Monocular Depth Pre-training for Semantic Segmentation
We explore how pre-training a model to infer depth from a single image compares to pre-training the model for a semantic task, e. g. ImageNet classification, for the purpose of downstream transfer to semantic segmentation.

Stereoscopic Universal Perturbations across Different Architectures and Datasets
We study the effect of adversarial perturbations of images on deep stereo matching networks for the disparity estimation task.
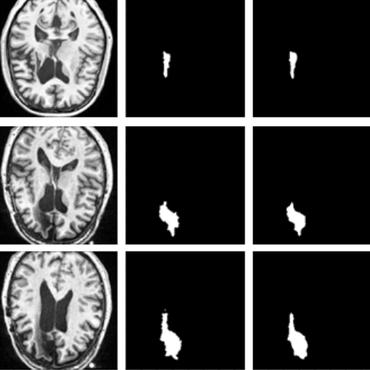
Small Lesion Segmentation in Brain MRIs with Subpixel Embedding
We propose a neural network architecture in the form of a standard encoder-decoder where predictions are guided by a spatial expansion embedding network.
Unsupervised Depth Completion with Calibrated Backprojection Layers
At inference time, the calibration of the camera, which can be different than the one used for training, is fed as an input to the network along with the sparse point cloud and a single image.
 Ranked #2 on
Depth Completion
on VOID
Ranked #2 on
Depth Completion
on VOID
An Adaptive Framework for Learning Unsupervised Depth Completion
We present a method to infer a dense depth map from a color image and associated sparse depth measurements.
Learning Topology from Synthetic Data for Unsupervised Depth Completion
We present a method for inferring dense depth maps from images and sparse depth measurements by leveraging synthetic data to learn the association of sparse point clouds with dense natural shapes, and using the image as evidence to validate the predicted depth map.
Ranked #3 on
Depth Completion
on VOID
Stereopagnosia: Fooling Stereo Networks with Adversarial Perturbations
We study the effect of adversarial perturbations of images on the estimates of disparity by deep learning models trained for stereo.
Targeted Adversarial Perturbations for Monocular Depth Prediction
We study the effect of adversarial perturbations on the task of monocular depth prediction.
Unsupervised Depth Completion from Visual Inertial Odometry
Our method first constructs a piecewise planar scaffolding of the scene, and then uses it to infer dense depth using the image along with the sparse points.
Ranked #4 on
Depth Completion
on VOID
Bilateral Cyclic Constraint and Adaptive Regularization for Unsupervised Monocular Depth Prediction
Supervised learning methods to infer (hypothesize) depth of a scene from a single image require costly per-pixel ground-truth.
Dense Depth Posterior (DDP) from Single Image and Sparse Range
We present a deep learning system to infer the posterior distribution of a dense depth map associated with an image, by exploiting sparse range measurements, for instance from a lidar.
Ranked #5 on
Depth Completion
on VOID
Geo-Supervised Visual Depth Prediction
We propose using global orientation from inertial measurements, and the bias it induces on the shape of objects populating the scene, to inform visual 3D reconstruction.
One Shot Learning via Compositions of Meaningful Patches
The task of discriminating one object from another is almost trivial for a human being.

Fidelity-Naturalness Evaluation of Single Image Super Resolution
In this paper, we proposed to use both fidelity (the difference with original images) and naturalness (human visual perception of super resolved images) for evaluation.

