Search Results for author:
Found 15 papers, 2 papers with code
3D Pose Nowcasting: Forecast the Future to Improve the Present
Technologies to enable safe and effective collaboration and coexistence between humans and robots have gained significant importance in the last few years.

CarPatch: A Synthetic Benchmark for Radiance Field Evaluation on Vehicle Components
Neural Radiance Fields (NeRFs) have gained widespread recognition as a highly effective technique for representing 3D reconstructions of objects and scenes derived from sets of images.

Semi-Perspective Decoupled Heatmaps for 3D Robot Pose Estimation from Depth Maps
Knowing the exact 3D location of workers and robots in a collaborative environment enables several real applications, such as the detection of unsafe situations or the study of mutual interactions for statistical and social purposes.


Multi-Category Mesh Reconstruction From Image Collections
Recently, learning frameworks have shown the capability of inferring the accurate shape, pose, and texture of an object from a single RGB image.
SHREC 2021: Track on Skeleton-based Hand Gesture Recognition in the Wild
Gesture recognition is a fundamental tool to enable novel interaction paradigms in a variety of application scenarios like Mixed Reality environments, touchless public kiosks, entertainment systems, and more.

Domain Translation with Conditional GANs: from Depth to RGB Face-to-Face
Can faces acquired by low-cost depth sensors be useful to catch some characteristic details of the face?
Learn to See by Events: Color Frame Synthesis from Event and RGB Cameras
Event cameras are biologically-inspired sensors that gather the temporal evolution of the scene.
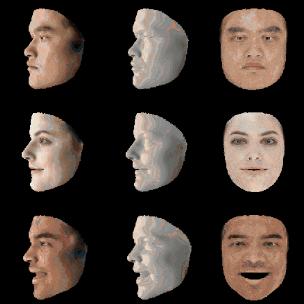
Learning to Generate Facial Depth Maps
In this paper, an adversarial architecture for facial depth map estimation from monocular intensity images is presented.

Learning to Detect and Track Visible and Occluded Body Joints in a Virtual World
Multi-People Tracking in an open-world setting requires a special effort in precise detection.
Face-from-Depth for Head Pose Estimation on Depth Images
Therefore, we propose a complete framework for the estimation of the head and shoulder pose based on depth images only.

Head Detection with Depth Images in the Wild
Two public datasets have been exploited: the first one, called Pandora, is used to train a deep binary classifier with face and non-face images.
From Depth Data to Head Pose Estimation: a Siamese approach
In this paper, we tackle the pose estimation problem through a deep learning network working in regression manner.

Fast Gesture Recognition with Multiple Stream Discrete HMMs on 3D Skeletons
HMMs are widely used in action and gesture recognition due to their implementation simplicity, low computational requirement, scalability and high parallelism.


Deep Head Pose Estimation from Depth Data for In-car Automotive Applications
Recently, deep learning approaches have achieved promising results in various fields of computer vision.
POSEidon: Face-from-Depth for Driver Pose Estimation
In this work, we present a new deep learning framework for head localization and pose estimation on depth images.